伊藤忠テクノソリューションズの科学・工学系情報サイト
伊藤忠テクノソリューションズの科学・工学系情報サイト

コラム:機構・切削
材料・工学技術部 応用技術第1課 武市 和久
[2021/03/23]
波動歯車装置は産業用ロボットのジョイントで広く用いられている機構で、楕円形カムの外周に肉薄のボールベアリングがはめられた「ウェーブジェネレータ」、楕円にたわむ金属弾性体の「フレクスプライン」、剛性のある真円の「サーキュラ・スプライン」の3点で構成された部品です。歯が弾性変形をしながら噛み合う事が特徴で、一般の平歯車と異なりバックラッシ(歯の噛み合い遊び)が非常に小さく、遊星歯車等と比較して部品点数が少ない上で同等以上の高減速比を得られるため、小型精密減速機として注目されている装置です。
この波動歯車装置のNVH解析を行うためには、専門の知識を必要とし、歯の弾性変形が発生するため膨大な計算時間が必要になります。DAFULの最新バージョンでは、形状を用意するのみでアセンブリまで出来る自動化モデラーとともに、必要最小限の弾性考慮による計算手法を組み合わせた「Strain Wave Gear Modeler」をリリースしましたのでご紹介いたします。
DAFULにおける波動歯車装置モデラーの概要を説明します。これはDAFUL/Drivetrainを拡張した機能になります。ユーザーは以下の幾何形状やFEボディを事前に用意します。
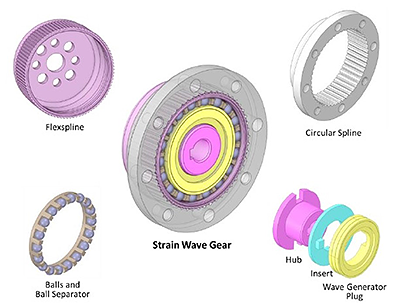
波動歯車装置の構成
フレクスプラインは弾性変形を考慮する必要があるためFEボディを使用し、また歯の変形とねじれ剛性を表現するのに十分なメッシュ分割が必要になります。
最後に、入出力の設定、接触面の設定、各部品の位置関係、ウェーブジェネレータの剛性、ベアリングのパラメータを設定して解析を実行します。
設定画面に各パラメータの意味合いを示す図があるので、参考に設定していきます。
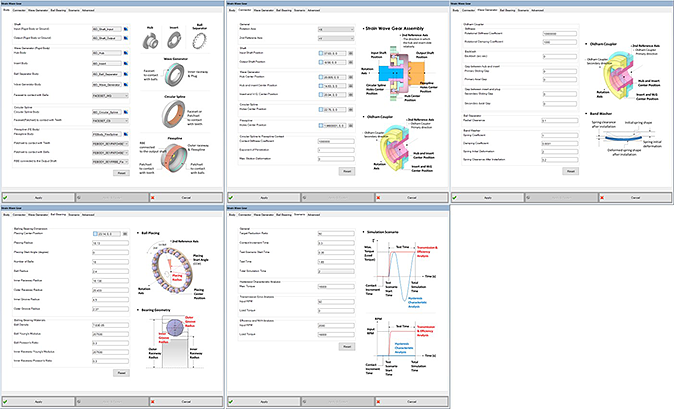
Strain Wave Gear ModelerのGUI
サンプルモデルによる解析の結果を示します。
下の図は入力回転条件50RPMにおける歯当たりと伝達誤差を表しています。サンプリング周波数は2000Hzです。
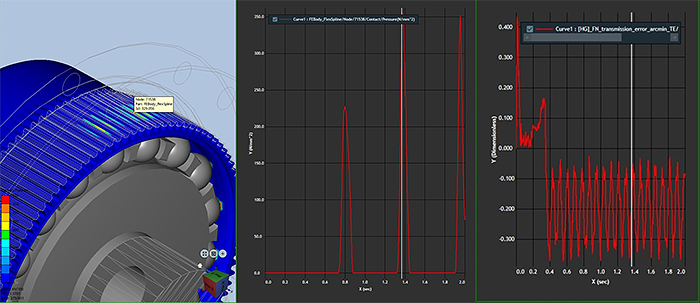
歯当たりのコンタ図(左)、接触圧(中)、伝達誤差(右)
他にも効率やヒステリシス特性などNVHにかかわる特性を出力する解析も行えます。それぞれの解析に必要な計算時間は以下表の通りです。
各モデルの解析条件と計算時間
| 解析モデル | D.O.F (million) |
RPM | トルク (Nm) |
解析時間 (sec) |
計算時間 |
|---|---|---|---|---|---|
| Hysteresis | 1.12 | 0 | ±16,000 | 2.5 | 4h 21min |
| Transmission Error | 0.43 | 50 | 0 | 2.5 | 3h 44min |
| Efficiency | 0.43 | 2000 | 16,000 | 0.6 | 5h 06min |
使用マシン: Intel®Xeon®Gold 6154 CPU @ 3.00GHz 2.99GHz 18 core, 64GB memory
現在、弊社ではDAFULに関する「体験セミナー」などをオンライン環境にて随時開催させて頂いております。さらに、解析に関する相談会なども随時開催いたします。お気軽にお問合せください。
またYoutubeにて、新バージョンの紹介動画をアップロードしております。本記事でご紹介しました 「Strain Wave Gear Modeler」についての内容も含まれていますので、ぜひご視聴頂けたらと思います。