伊藤忠テクノソリューションズの科学・工学系情報サイト
伊藤忠テクノソリューションズの科学・工学系情報サイト

コラム:熱流体
アプリケーションサービス部 CAEサービス第2課 橋本 元信
[2020/03/18]
原油生産量の大きな割合を占める海洋石油資源の開発、日本の周辺海域に大量に存在していると予測されるメタンハイドレートの開発など、資源開発は陸上から海へ、更には浅海から深海へと拡大しています。そしてこれらの資源開発には洋上の浮体式生産貯蔵積出設備(FPSO:floating production, storage and off loading)や緊張係留式プラットフォーム(TLP:Tension-leg platform)が活用あるいは、利用が検討されています。これらの設備は基盤が海上に浮かぶ船舶やプラットフォームですので陸上のプラントとは異なり、設備自体の揺れが設計する上での注意すべき大きな課題となります。
また航空機のフライトプランや戦闘機の急旋回、洋上の船舶や潜水艦の潜航等でも上記のFPSOやTLP と同様に姿勢や加速度が設計の上で検討すべき事項になります。
このような姿勢や加速度の変化を考慮すべき事項の1つとして1次元の熱流動システム、すなわち流体の流れを検討すべきと考えます。
図1は、ポンプから50m 離れたタンクに液を充填するシンプルなモデルです。このモデルが洋上の船舶上に設置され、波の影響により船舶が±5 度の範囲で上下し、配管系の角度が変化した状態を想定しています。船舶が下降している際に液の供給流量は増大しますが、船舶が上昇している時は逆止弁が動作して逆流は生じません。その結果、タンクの液位は振動しない場合より高くなる予測結果が得られました。このように非定常的なシステムの姿勢変化の影響により、システムの性能が変化することが解ります。
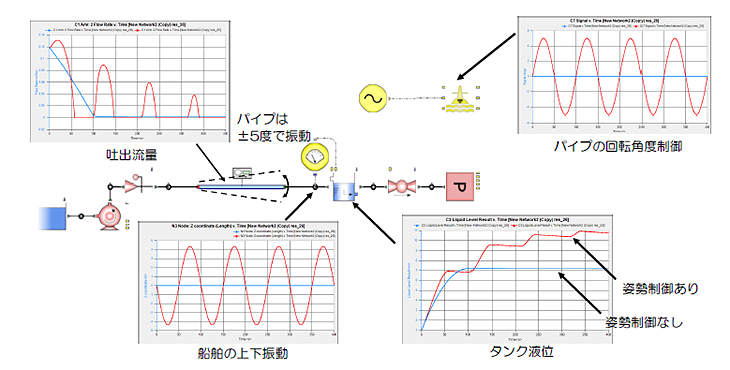
図1 船舶上のシンプルな配管モデル例
図2は、潜水艦浮上過程における姿勢制御のモデルです。制御のメカニズムは次のようになります。①潜水艦の浮上速度と水平速度から、潜水艦の進行方向の角度を計算します。②PID 制御器は、進行方向の角度を設定値として加圧点の空気圧を計算します。③加圧点の空気圧を増大させると、④前方のタンクの水位が低下し、⑤後方のタンクの水位が上昇します。⑥タンクの水位の変化により重心位置が変化します。⑦重心位置の変化により潜水艦の角度(ピッチ)が変化します。この角度は②のPID制御器にフィードバックされます。設定値に従って潜水艦の角度が制御されているのが確認できます。
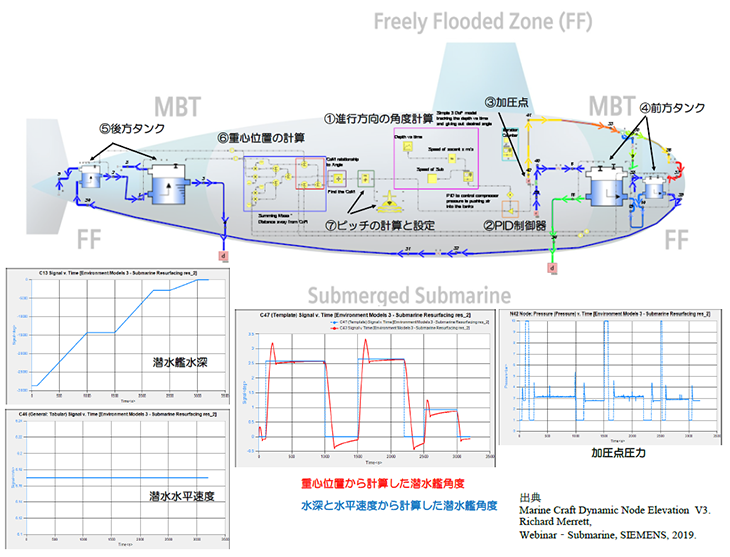
図2 潜水艦浮上過程の制御モデル検討例
これら2つの例は1次元熱流動解析ソフトウェアであるSimcenter Flomaster で検討できます。またFlomaster では3D CADからのインポート機能を利用する事で、1次元システムモデルの姿勢と加速度の検討に必要な 3次元位置情報を含めた幾何形状を効率よく利用できます(図3)。
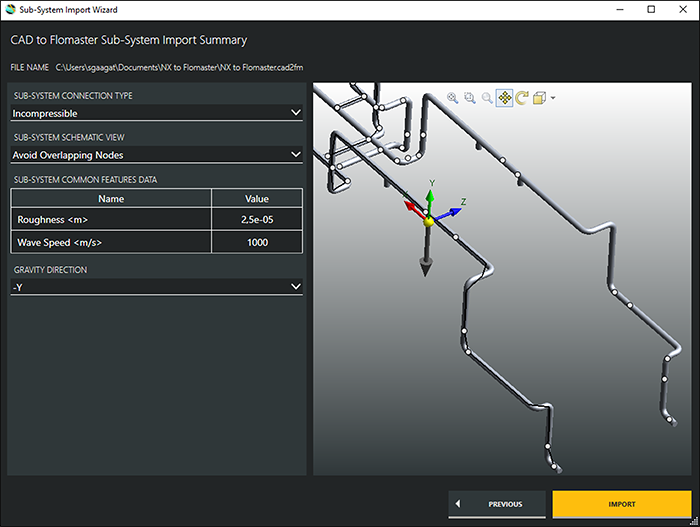
図3 3次元CADインポート機能例
このようにFlomaster はシステムの姿勢や加速度が流れに及ぼす影響の解析が可能であり、弊社および開発元は、今後とも積極的に新機能の開発に取り組んでまいります。
1次元熱流動解析ソフトウェアSimcenter Flomaster
http://www.engineering-eye.com/FLOWMASTER/